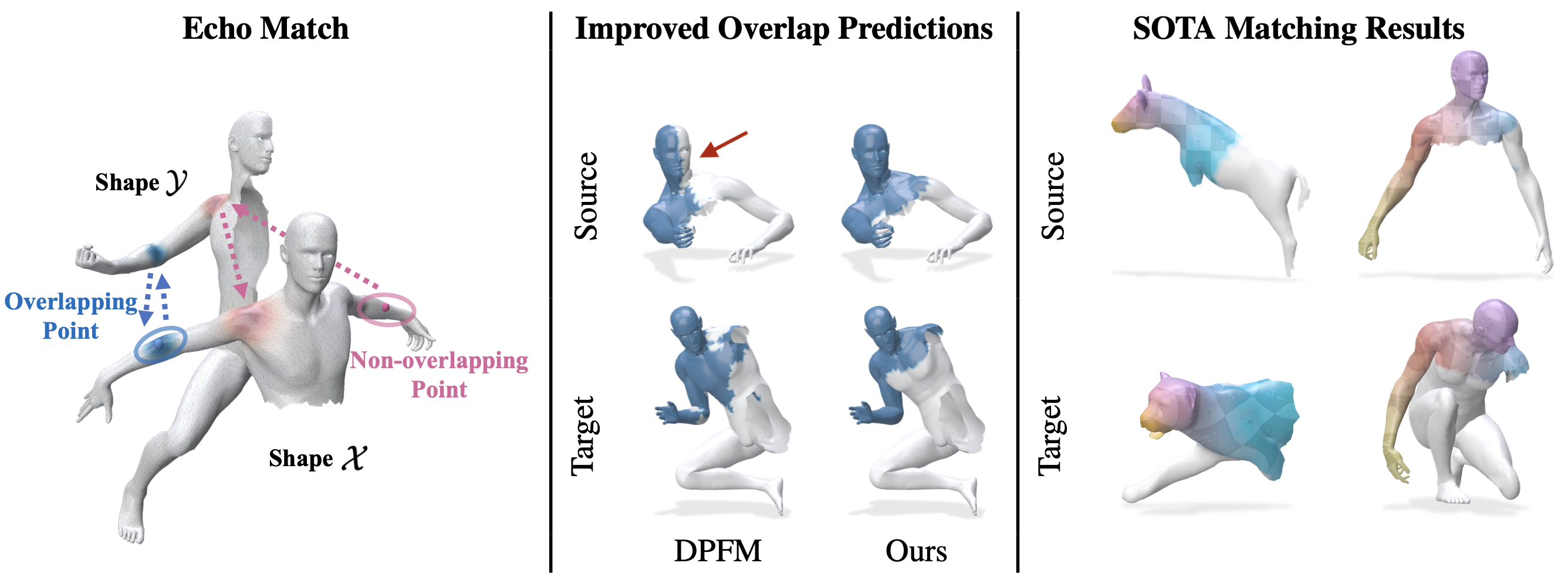
EchoMatch is a novel framework for partial-to-partial shape matching. It introduces correspondence reflection to enable overlap prediction within a functional map framework, outperforming state-of-the-art methods.
Abstract
Finding correspondences between 3D shapes is a crucial problem in computer vision and graphics. While most research has focused on finding correspondences in settings where at least one of the shapes is complete, the realm of partial-to-partial shape matching remains under-explored. Yet, it is important since in many applications shapes are only observed partially due to occlusion or scanning. Finding correspondences between partial shapes comes with an additional challenge: We not only want to identify correspondences between points on either shape but also have to determine which points of each shape actually have a partner. To tackle this challenging problem, we present EchoMatch, a novel framework for partial-to-partial shape matching that incorporates the concept of correspondence reflection to enable an overlap prediction within a functional map framework. With this approach, we show that we can outperform current SOTA methods in challenging partial-to-partial shape matching problems.
Pipeline
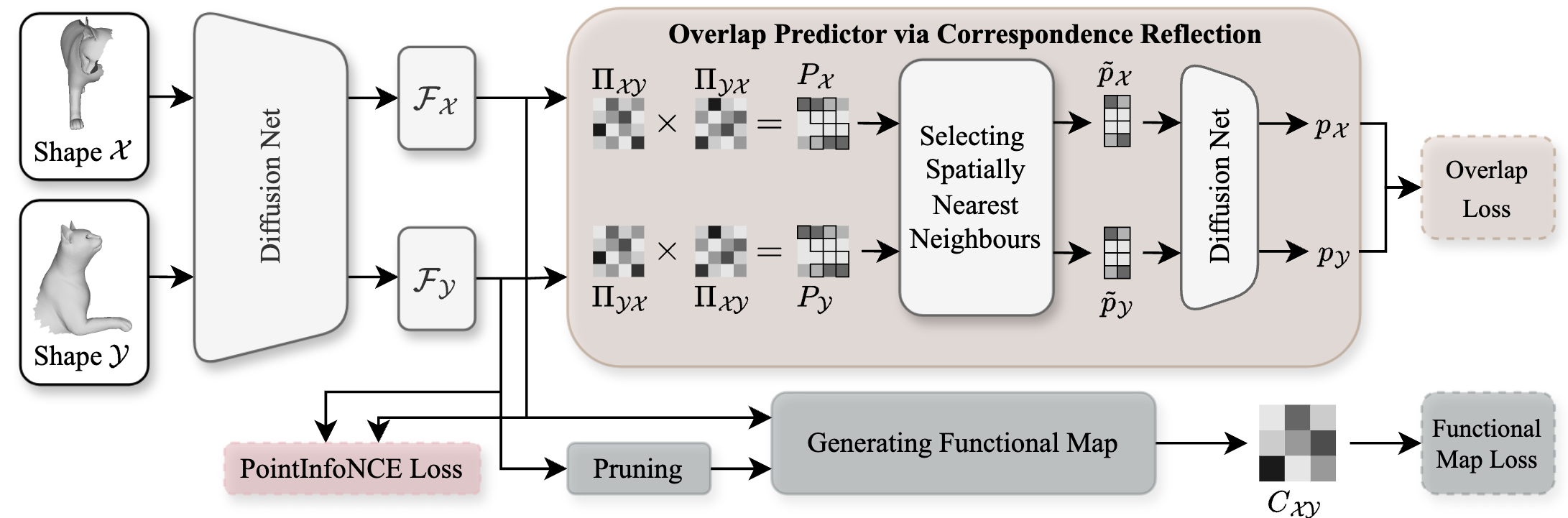
The EchoMatch pipeline consists of four main parts: 1) For two shapes X and Y, we extract per-vertex feature vectors (collected in feature matrices FX and FY) using a Diffusion Net. 2) Using these features, we predict an overlap score for every point utilizing EchoMatch. 3) We compute the functional map utilizing the features (we prune FY to this end). 4) Finally, we calculate a point-wise normalized cross-entropy (PointInfoNCE) loss for both feature matrices FX and FY.